Etude de quelques Rťseaux locaux
Dans ce chapitre, nous allons (enfin) ťtudier le fonctionnement de quelques Rťseaux. En particulier, il me semble logique de vous parler d'ETHERNET + TCP-IP, de CAN et de I2C. Bien entendu, ce chapitre n'est pas exhaustif, et ne pourrait pas l'Ítre. En effet, le renouvellement quasi permanent des technologies ne le permettrait pas.
Mais avant de prťsenter ces Rťseaux, nous allons regarder un petit lexique des diffťrents Rťseaux disponibles sur le marchť.
Il faut noter que bon nombre de Rťseaux ne sont que des variantes des Rťseaux les plus connus (ce qui ŗ tendance ŗ rendre l'offre encore plus difficile ŗ analyser), on retiendra pour l'exemple FIPIO qui est une version SENSOR BUS de FIP et FIPWAY la version DEVICE BUS. Mais les exemples ne s'arrÍtent pas lŗ puisque certains Rťseaux (comme CAN ou FIP, considťrťs comme des technologies), sont utilisťs comme des "supports" pour des applications, ce qui fait qu'entre 2 Rťseaux basťs sur CAN, il n'y a souvent que la couche 7 (couche d'application) qui les rend incompatible (par exemple SDS, DEVICENET, VAN et CAL ne sont que des applications spťcifiques de CAN pour un type de fonctionnement prťcis).
Ce genre de rťcupťration est assez intťressante puisqu'elle autorise l'utilisation de systŤmes CAN tout en les rendant plus spťcifique donc plus adaptable. Le bus I2C
Le bus I2C est nť en 1992 quand sa premiŤre version fut normalisťe par líIEEE. Ce bus, ŗ líorigine conÁu pour líinterfaÁage des pťriphťriques díun calculateur, est une "ťvolution" du bus parallŤle IEEE 488 prťcťdemment ťtudiť. Son principe repose sur l'utilisation d'un bus d'instrumentation sťrie (donc mieux protťgť et moins coŻteux que le bus parallŤle HPIB).
Le bus I2C est une liaison synchrone, trifilaire, d'un dťbit variant entre 0 et 100Kbaud, multimaÓtre et basť sur un double mode de transfert de donnťes (maÓtre/esclave ou producteur/consommateur). Nous verrons plus loin la diffťrence entre ces 2 modes de fonctionnement, mais pour commencer intťressons-nous aux ťchanges sur le bus.
Les illustrations prťsentťes dans ce document sont extrait de la notice de spťcification du bus I2C proposťe par Philips. Dťfinitions du bus I2C.
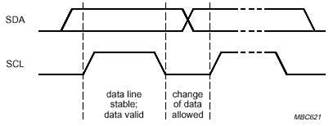
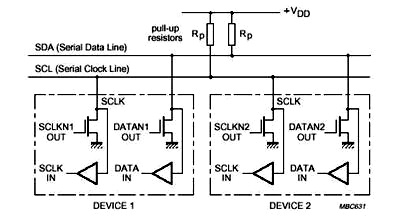
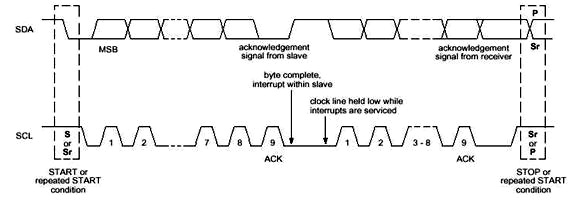
Les 3 lignes utilisťes par le bus I2C sont SCL (pour System CLock), SDA (pour Serial DAta) et enfin un fil de masse pour identifier les niveaux logiques transmis. La ligne SCL est la propriťtť du maÓtre de l'ťchange, elle dťfinie l'horloge qui rythme la frťquence des ťchanges entre les 2 machines en communication et avec laquelle on doit Ítre synchronisťe , tandis que la ligne SDA sert ŗ l'ťchange des donnťes du producteur vers le consommateur. Les donnťes prťsentes sur le bus sont valide uniquement quand la ligne SCL est ŗ l'ťtat haut.
Fonctionnement.
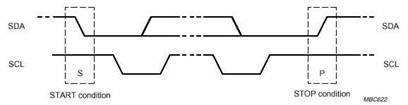
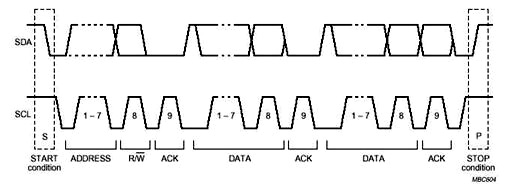
La transmission dťbute avec une transition de l'ťtat haut ŗ l'ťtat bas de la ligne SDA lorsque la ligne SCL est ŗ l'ťtat haut (donc lorsqu'il n'est pas sensť y avoir de changement d'ťtat sur la ligne SDA), ce qui identifie formellement le dťlimiteur de dťbut de trame. Elle s'achŤvera par une transition de l'ťtat bas ŗ l'ťtat haut de la ligne SDA lorsque SCL est ŗ l'ťtat haut, pour identifier le dťlimiteur de fin de trame.
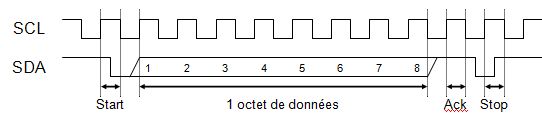
AprŤs la transition marquant un dťbut de trame, l'ťmetteur envoie un octet de donnťes. Puis il envoie un bit ŗ l'ťtat haut et attend que le destinataire du message le force ŗ l'ťtat bas, pour ťmettre alors le marqueur de fin de transmission. Trame fondamentale.
Le principe du bus I2C est de transmettre via une liaison trifilaire des informations numťriques sur des distances de quelques mŤtres, il est donc volontairement trŤs limitť dans ses capacitťs de transfert. Ainsi, une trame I2C ťlťmentaire est composťe des champs suivants :
Un dťlimiteur de dťbut de trame ; Un champ de donnťe de 8 bits ; Un bit de validation ; Un dťlimiteur de fin de trame.
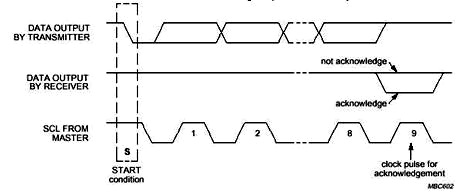
Lors d'une transmission, le producteur et le consommateur doivent valider rťguliŤrement leurs ťchanges. Tous les 8 bits, les 2 machines en communication valident les 8 derniers bits reÁus, c'est l'acquittement du message.
Le processus d'acquittement repose sur l'envoie par l'ťmetteur d'un bit rťcessif et son ťcrasement par le rťcepteur qui renvoie alors un bit dominant. Le non respect d'un acquittement peut entraÓner la rťmission du message ou l'abandon de la transmission. Gťnťralement, la transmission est abandonnťe et les machines retentent une transmission pour terminer leur ťchange. Restriction ŗ l'utilisation du bus I2C.
Le bus I2C n'est pas ŗ proprement parler un bus conÁu pour des transmissions ŗ grande distance. En effet, comme il utilise des circuits ťlectriques ŗ collecteur (ou ŗ drain) ouvert, il convient d'utiliser des rťsistances de "Pull-up" pour dťfinir le niveau de tension sur la ligne lorsque les transistors sont bloquťs. Ces rťsistances doivent avoir un valeur prťcise de faÁon ŗ ne pas risquer d'endommager les composants permettant l'accŤs au mťdium. Or le simple fait d'utiliser des rťsistances impose une dťfinition de la capacitť parasite maximum tolťrťe par le bus pour atteindre le dťbit recherchť. Cette capacitť est la somme des capacitťs de couplage (capacitťs internes des composants branchťs sur la ligne) et de la capacitť linťique du canal. Globalement, cette impťdance ne peut pas dťpasser 400pF (soit pour un bus ŗ 4 machines, une ligne de l'ordre de 2 mŤtres).
Il convient de noter que l'utilisation du bus I2C, soit en mode Fast (400Kbaud), ou en mode High Speed (3,4Mbaud), implique que la charge capacitive tolťrťe soit rťduite ŗ 200pF et on doit utiliser des composants actifs pour ťtablir les niveaux de tension, de faÁon ŗ engendrer la circulation d'un courant de 3mA sur la ligne. Organisation de l'ťchange de donnťes.
Le simple fait d'utiliser plusieurs machines sur une ligne impose de dťfinir des rŤgles strictes pour l'accŤs au mťdium. On verra plus loin comment les ťchanges sont synchronisť entre les diffťrentes machines, mais commenÁons par analyser comment I2C permet l'adressage des machines qui le compose.
Adressage.
La faible longueur de la trame de donnťe du bus I2C ne permet naturellement pas de rťaliser ŗ la fois un adressage de qualitť et une transmission efficace de donnťes.
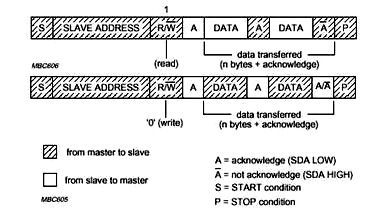
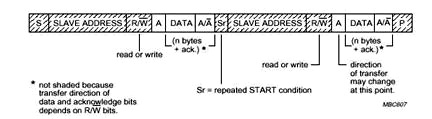
On rťalise donc la concatťnation de plusieurs trames simples pour crťer une trame complŤte possťdant : un champ d'adresses de taille variable (on verra qu'il existe deux modes d'adressages, un sur 7 bits, l'autre sur 10 bits); un bit dťfinissant le sens de l'ťchange (Read ou Write) et d'un champ de donnťes de K fois 8 bits (ce champ est obtenu par concatťnation de K trames de 8 bits de donnťes).
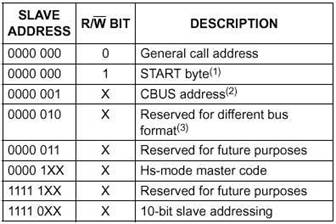
Dans un adressage sur 7 bits, on utilise certaines adresses spťcifiques pour rťaliser des fonctions spťciales.
Par exemple, l'adresse 0 (General Call Adress) permet d'ordonner, selon la valeur de l'octet suivant (associť ŗ l'octet d'adresse), la remise ŗ zťro de l'ensemble des machines ou la rťinitialisation de leur adressage.
Toutes les adresses ne sont donc pas utilisables. Les adresses interdites sont 0000 XXX et 1111 XXX. Le comitť I2C dťfinit donc pour diffťrents composants des adresses incluant une partie fixe et une partie programmable. Ces adresses programmables permettent d'utiliser sur un mÍme montage plusieurs fois le mÍme composant.
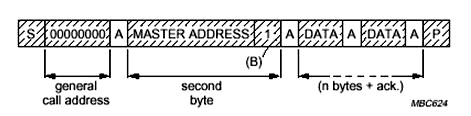
Comme on la vu, pour lancer un appel gťnťral, le premier octet transmis doit obligatoirement Ítre ŗ 0. C'est l'octet suivant qui dťfini la fonction rťalisťe. Si le second octet fini par un "zťro" (son LSB est ŗ "0"), alors on a un RESET logiciel.
Si le LSB est ŗ "1", on est en prťsence d'un message provenant d'une machine qui n'a pas la possibilitť de connaÓtre ŗ priori l'adresse de la machine consommatrice (par exemple un scanner ou un clavier d'ordinateur) et qui utilise une procťdure de GENERAL CALL pour se faire connaÓtre, en envoyant son adresse (sur 7 bits) suivi des donnťes ŗ transmettre.
En cas de RESET logiciel, c'est le contenu du deuxiŤme octet qui dťfini la commande effectuťe par les pťriphťriques Rťseaux. Si l'octet vaut 4, on demande ŗ toutes les machines de remplacer leur adresse programmable "par dťfaut" par celle obtenue par programmation. Si l'octet vaut 6 alors toutes les machines font une remise ŗ zťro et chargent leurs adresses par dťfaut.
Transmission des donnťes par paquets.
Du fait de sa faible capacitť de transfert, le protocole I2C impose une transmission par paquet. Imaginez sinon, qu'une fois l'adressage rťalisť, on soit limitť ŗ une seule trame de donnťe, l'efficacitť de codage devient alors 38%. Par contre si l'on rťalise une transmission par paquet, on concatŤne des trames de donnťes ŗ la suite les unes des autres aprŤs une trame d'adresse pour transmettre un grand nombre d'octets de donnťes sans refaire d'adressage, d'oý un sťrieux gain d'efficacitť. Par exemple, l'ťmission de 10 trames de donnťes permet d'obtenir une efficacitť de codage de 80% (correct).
Mais ce mode de transmission est dangereux car si l'on ne limite pas le temps de parole, une machine peut totalement s'accaparer le Rťseau.
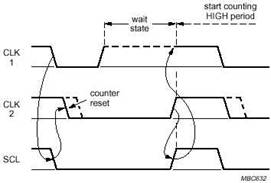
Il est possible, entre 2 trames, de faire apparaÓtre un "temps de relaxation". Ce temps permet au rťcepteur (ou ŗ l'ťmetteur) du message de rťaliser un traitement des donnťes reÁues (ou ŗ ťmettre) avant de poursuivre la transmission, sans avoir ŗ libťrer la ligne. Bloquer la ligne SCL ŗ 0 permet alors, sans consťquences pour les autres machines prťsentes, d'interrompre l'ťchange.
Pour se protťger de la dťfaillance de l'un des 2 núud qui pourrait maintenir la ligne SCL ŗ l'ťtat bas indťfiniment ou qui pourrait ne plus libťrer la ligne, on utilise gťnťralement des "chiens de gardes" (WATCHDOG) pour limiter la durťe d'activitť des composants.
Synchronisation des ťchanges.
Le maÓtre du bus a pour rŰle la crťation de l'horloge de transmission. Cette horloge ne doit pas Ítre perturbťe par des ťlťments extťrieurs (sauf en cas d'arbitrage). Par exemple, si 2 machines souhaitent prendre possession du bus, elles ťmettent leur horloge. Il faut donc les synchroniser entre elles. Plus gťnťralement, ťmetteurs et rťcepteurs synchronisent leurs horloges respectives lors des ťchanges.
Vu la mťthode utilisťe pour se connecter au mťdium, l'ťtat bas est un ťtat dominant c'est ŗ dire qu'il l'emporte sur tous les autres ťtats du bus, la durťe de l'ťtat bas de la ligne SCL dťpend uniquement de la machine la plus lente, tandis que la durťe de l'ťtat haut dťpend de l'horloge la plus rapide. Arbitrage.
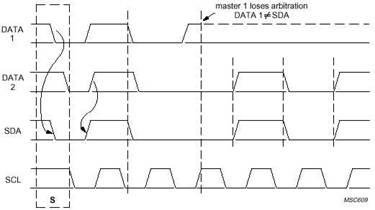
Lorsque les horloges sont synchronisťes, on se retrouve dans le cas oý la ligne de donnťe doit arbitrer l'ťchange. C'est donc sur le contenu du message (comme pour le protocole CSMA/NBA) que sera rťalisť l'arbitrage.
Encore une fois, du fait de la liaison avec les lignes du Rťseau, les ťtats rťcessifs sont ťcrasťs par les ťtats dominants. Ainsi le message contenant le plus de bits dominants est aussi le plus prioritaire.
Modes de transmissions.Transmission en Mode Simple.
Dans les ťchanges en mode simple, l'un des maÓtres du Rťseau s'accapare le bus pour rťaliser un transfert unidirectionnel de donnťes vers une seule machine.
Une fois que le maÓtre a pris possession de la ligne (imposition de l'horloge), il commence ŗ ťmettre l'octet d'adressage (7 bits d'adresse et 1 bit de sens) puis il demande ŗ sa cible (l'esclave) de confirmer l'acceptation de l'ťchange (acquittement). Une fois l'adresse acceptťe, le maÓtre, selon la valeur du bit de sens, lit ou ťcrit successivement l'ensemble des octets en les acquittant (ou en demandant l'acquittement, selon qu'il est respectivement consommateur ou producteur) les uns aprŤs les autres.
Attention, lorsque le maÓtre envoie un ordre de lecture, cela signifie qu'il se place comme consommateur du message (c'est lui qui lit), tandis qu'avec un ordre d'ťcriture, il se place comme producteur du message.
Lorsque le maÓtre est aussi le consommateur, la seule faÁon qu'il a d'arrÍter l'ťchange est de ne pas acquitter le dernier octet envoyť (tout en le conservant). Le producteur rompt alors l'ťchange et arrÍte d'ťmettre.
Le cas inverse peut se produire, si le maÓtre ťmet et ne rťcupŤre pas d'acquittement pour l'un de ses messages, il cesse immťdiatement d'ťmettre et, si l'ensemble des donnťes n'a pas encore ťtť expťdiť, il essaiera de contacter ŗ nouveau la machine cible en recommenÁant l'adressage.
Dans tous les cas, aprŤs avoir envoyť son dernier octet ou en l'absence d'un acquittement, le maÓtre ťmet une commande de Stop.
Mode combinť.
Une machine maÓtre peut parler ŗ plusieurs machines, ŗ la suite, ou souhaiter modifier le sens de l'ťchange. Dans ce cas, le maÓtre ŗ la possibilitť de changer d'adressage sans avoir ŗ rendre la ligne, c'est le mode combinť.
Dans ce mode, avant d'ťmettre une nouvelle adresse, le maÓtre ťmet ŗ la fin de son prťcťdent message, non pas un bit de commande d'arrÍt de transmission (Stop), mais au contraire, un bit de commande de dťbut de transmission (Start). On dit alors que c'est une commande de redťmarrage. Evolution.
Il existe certaines ťvolutions du bus I2C, en particulier, les auteurs de la norme tendent vers des versions de I2C ŗ des dťbits plus ťlevťs avec plus de núuds. Cette course en avant ŗ conduit ŗ l'utilisation de format d'adresse sur 10 bits, le dťveloppement de mode de transmission plus rapide (400K et 3,4Mbaud).
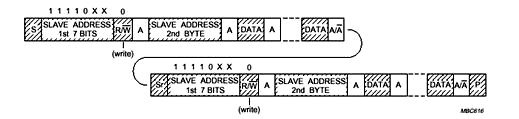
Adressage sur 10 bits.
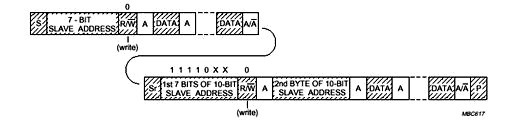
L'adressage sur 10 bits repose sur l'utilisation de 2 trames pour coder l'adresse du destinataire. La premiŤre trame ťmise ťtant trŤs fortement amputťe par le codage du mode d'adressage (le mode 10 bits est codť 1111 0XX oý les XX sont les 2 bits de poids fort de l'adresse du destinataire). Le huitiŤme bit de la premiŤre trame d'adresse reste le bit qui code le sens de transfert (comme dans le mode d'adressage ŗ 7 bits). La seconde trame est constituťe des 8 derniers octets d'adressage. Attention, encore une fois, chaque octet doit Ítre acquittť. Ce mode d'adressage permet de dialoguer avec plus de machines que le classique mode 7 bits. De plus, il continue ŗ Ítre utilisable avec des machines fonctionnant en mode 7 ou en mode 10 bits. Une machine en mode 7 bits comprenant par la lecture du premier octet d'adresse qu'il s'agit d'un format 10 bits. Exemple de transmission vers 2 machines (mode combinť) en adressage 10 bits.
Exemple de transmission vers 2 machines (mode combinť) en adressage 7 bits puis en 10 bits. Les modes de transfert Haut dťbit.
Les ťvolutions de la norme I2C permettent maintenant d'atteindre des dťbit jusque lŗ inaccessible. Au fur et ŗ mesure de l'ťvolution technique, on a utilisť des dťbits de 400Kbaud (Fast Mode) et maintenant on atteint 3,4Mbaud (High Speed Mode).
Fast Mode.
En mode rapide comme en mode standard, le mÍme bus I2C permet aussi bien la transmission des signaux ŗ 100 qu'ŗ 400Kbaud. Par contre, on doit alors respecter scrupuleusement la limitation de la charge capacitive du bus ŗ 200pF. Si toutefois, on souhaite augmenter cette valeur, il faut utiliser non plus des transistors en collecteur ouvert pour l'accŤs ŗ la ligne, mais des sources de courant de 3mA (max).
High Speed Mode.
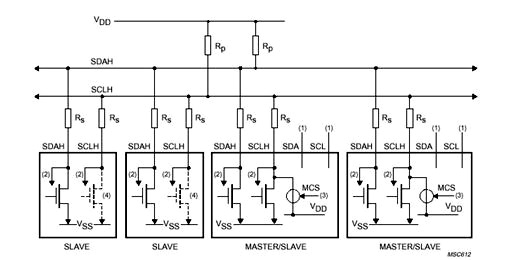
Le mode grande vitesse permet d'atteindre des dťbits de 3,4Mbaud, sur une ligne un peu particuliŤre puisqu'elle doit Ítre pilotťe par des sources de courant et non par des transistors en collecteur ouvert, un peu comme dans une liaison rapide. On utilise donc des lignes spťcifiques au fonctionnement ŗ grande vitesse, les ligne SDAH et SCLH. Ces lignes doivent pouvoir Ítre compatible avec le mode basses vitesses.
Les rťsistances de pull-up existant toujours, la charge capacitive de la ligne est encore abaissťe pour atteindre 100pF maximum en mode normal. On peut quand mÍme augmenter la capacitť de la ligne en remplaÁant les rťsistances par des ťlťments actifs.
Du fait de ces profondes modifications, le mode haute vitesse interdit totalement de rťaliser des arbitrages. En cas de bus multimaÓtre, les arbitrages seront rťalisťs sur les lignes basses vitesses.
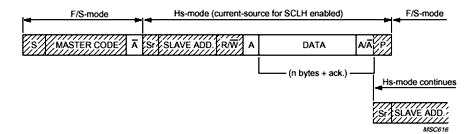
Pour commencer un transfert ŗ grande vitesse, on dťmarre paradoxalement la transmission par un premier octet (0000 1XXX) en mode standard pour arbitrer entre les diffťrentes machines qui souhaitent la maÓtrise du bus (avec un arbitrage sur les 3 bits X). Une seule machine gagne alors la main (c'est le principe de l'arbitrage), mais l'octet prťcťdemment ťmis n'est pas acquittť. La communication prend alors fin en mode classique et dťmarre alors en mode grande vitesse.
En mode grande vitesse, la trame commence par une condition de redťmarrage suivie soit d'un adressage sur 10 bits, soit d'un adressage sur 7 bits. Puis la machine contrŰlant le bus envoie (ou reÁoit) des donnťes en recevant un acquittement ŗ chaque octet. Le fonctionnement grande vitesse permet tout de mÍme ŗ la machine maÓtresse de "libťrer" la ligne d'horloge en fin de message pour permettre ŗ d'autres machines de la bloquer ŗ l'ťtat bas.
En conclusion, en mode HS (High Speed), comme en mode standard, le protocole reste identique, seul l'accŤs au mťdium change.
Protocole de transfert en mode HS Exemple de liaison au mťdium des composants autorisant le mode HS
Il faut remarquer que les composant "maÓtre-esclave" disposent de 2 liaisons. D'une part, une liaison HS, d'autre part, une liaison standard. La seconde liaison permet de transformer ce núud en pont entre deux Rťseaux I2C, l'un utilisant le mode grande vitesse, le second utilisant le mode standard.
|