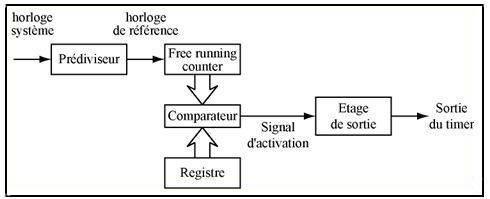
Le Timer est un des ťlťments primordiaux des microcontrŰleurs. Mais pour mieux comprendre les timers, commenÁons par nous poser la question de leur utilisation, ŗ quoi servent ils ? Et essayons d'y rťpondre par quelques exemples. Exemples de fonctions nťcessitant un timer.Une note de musique, c'est une onde, ŗ une frťquence donnťe. Par exemple le "la" moderne est ŗ une frťquence de 440 Hz. Le "la" aiguŽ (c'est-ŗ-dire avec une octave de plus) est ŗ 880 Hz (monter d'une octave ťquivaut ŗ multiplier par deux la frťquence du signal), tandis que le la grave (avec une octave de moins) est ŗ 220 Hz. Posons nous maintenant la question suivante : Comment fabriquer un signal carrť dont la frťquence serait de 440 Hz ŗ partir d'un quartz ŗ 16 MHz ? Le rapport de division entre ces 2 frťquences n'ťtant pas un entier, en utilisant un systŤme logique, cela va Ítre particuliŤrement difficile. Avec un timer, ce problŤme est trivial ! Autre exemple, supposons maintenant que nous souhaitons rťaliser un systŤme d' "homme-mort", c'est-ŗ-dire un systŤme qui dťclenche une alarme si il n'y a pas eu de pression sur un bouton pendant un temps supťrieur ŗ 5 minutes. Sans timer, il faudrait donc alors mobiliser toute la puissance de calcul du microcontrŰleur simplement pour compter le temps qui s'est ťcoulť depuis que le bouton a ťtť enfoncť pour la derniŤre fois. Un timer fait exactement la mÍme chose, mais en laissant le microcontrŰleur libre... Pour Ítre plus synthťtique, ŗ partir de nos 2 exemples, un timer peut servir ŗ dater des ťvťnements extťrieurs (on parle alors d'horodatage ou du mode Input Capture) ou alors ŗ gťnťrer des signaux (on parle dans ce cas de mode Output Compare). Comment fonctionne un Timer ?Un timer est composť d'un ensemble d'ťlťments assez simple. Le premier de ces ťlťments, par ordre d'importance, est un compteur (le Free Running Counter), qui compte de faÁon "perpťtuelle" +1 (on dit aussi qu'il s'incrťmente) ŗ chaque front actif de son entrťe d'horloge. Comme ce compteur a une taille (un nombre de bits de comptage) limitťe, si l'on souhaite traiter des phťnomŤnes lents, il est indispensable de pouvoir modifier la frťquence de son entrťe d'horloge. Pour cela, on place entre l'horloge du microcontrŰleur et l'horloge du Free Running Counter un prťdiviseur d'horloge, programmable (prescaler en anglais). On a donc maintenant un compteur qui peut travailler sur une trŤs vaste gamme de frťquence. Ceci est le point commun entre les modes Input Capture et Output Compare. Mode Input Compare
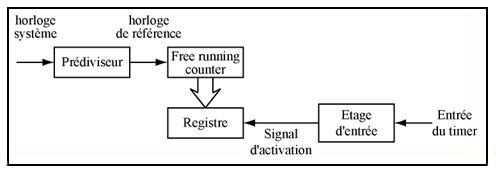
Mode Input Capture Dans le mode Input Capture, le timer doit stocker la valeur du Free Running Counter dans un registre lorsque l'entrťe qui lui est associťe passe ŗ l'ťtat actif. Ce sera la possibilitť de mesurer un temps par exemple |