Historique :
On peut considérer que les Réseaux locaux sont apparus il y a une soixantaine d’années. Dès l’origine, deux familles de Réseaux sont apparus, d’un coté, les Réseaux de données, qui avait pour but le transfert de flux importants de données, et de l’autre les Réseaux de terrain, qui bien que nettement moins répandus étaient utilisés pour transférer des données (souvent élémentaires) entre un calculateur et des automates ou entre un calculateur et des instruments de mesure.
Dans cette dernière catégorie, nous pouvons citer 2 Réseaux très connus, que nous étudierons sommairement dans les chapitres suivants, HPIB (IEEE 488) et RS 232. Toutefois l'expansion des performances de l'électronique créant le développement de l’informatique que nous connaissons, ces Réseaux furent vite dépassés, et bien que les normes RS 232 et HPIB restent encore utilisées de nos jours, il convient de fortement relativiser leur domaine d’utilisation.
Aujourd'hui, les Réseaux sont des éléments courants de l’informatique. ETHERNET est le Réseau local le plus utilisé au monde, mais ETHERNET, bien que de plus en plus présent dans le monde des RLI, n’est pas toujours adapté aux besoins de communication (en particulier entre des capteurs et des automates). C’est ici qu’apparaissent les Réseaux locaux industriels.
On cherche en général, lors de l’utilisation d’un Réseau, une approche simple et transparente des communications, une réduction des coûts de fabrication (dans la mesure où le câblage diminue et où les coûts de développement sont souvent réduits) et surtout un standard, disponible pour toutes les applications industrielles de fabrication.
Or c'est là que se situe le principal problème avec les Réseaux locaux, la multiplication des standards rend souvent la sélection complexe, seuls comptent alors l'application et le matériel disponible. Car, souvent les constructeurs d'automates sont aussi des constructeurs de Réseaux locaux, d'où une parfaite compatibilité de leurs machines, et par extension inadéquation pour les machines des autres marques.
Heureusement, certains systèmes semblent devenir des standards de fait, c'est à dire des standards par la force des choses. A ce petit jeu, rare seront les gagnants, mais on peut tout de même citer l’exemple du bus CAN, devenu un quasi standard pour les Réseaux embarqués (dans l'automobile ou dans aéronautique).
Il n'en reste pas moins que l'avenir n'est pas toujours clair. On peut donc espérer qu'à l'instar de l'informatique, les prochaines années verront apparaître, non un, mais un ensemble de Réseaux normalisés, standardisés et accessible par tous les fabricants.
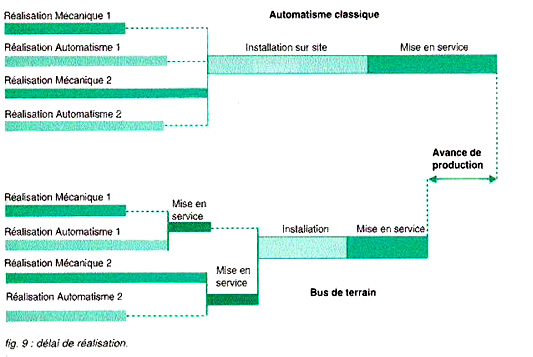
Exemple de minimisation de coûts Par mise en œuvre de Réseaux
Analyse présentée par SCHNEIDER sur une application industrielle
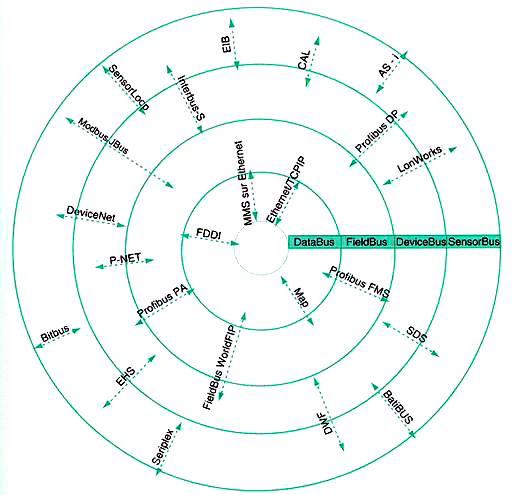
Les Réseaux les plus connus et leur domaine de prédilection.
On nomme DATABUS, les Réseaux chargés de transférer des quantités importantes de données à longue distance (+1000km), sans notion de temps réel.
On nomme FIELDBUS, les Réseaux qui permettent de contrôler les structures, soit une quantité relativement faible de donnée à faire circuler sur des distances assez importantes (qq km), avec une notion d'événement temps réel.
On nomme DEVICEBUS, les Réseaux locaux qui font transiter des flots peu importants de données sur de faibles distances (qq 100m) en temps réel.
On nomme SENSORBUS, les Réseaux locaux qui ne font transiter que des événements sur des distances réduites (de 10 à 100m) en temps réel.
|