Etude de quelques Rťseaux locaux
Dans ce chapitre, nous allons (enfin) ťtudier le fonctionnement de quelques Rťseaux. En particulier, il me semble logique de vous parler d'ETHERNET + TCP-IP, de CAN et de I2C. Bien entendu, ce chapitre n'est pas exhaustif, et ne pourrait pas l'Ítre. En effet, le renouvellement quasi permanent des technologies ne le permettrait pas.
Mais avant de prťsenter ces Rťseaux, nous allons regarder un petit lexique des diffťrents Rťseaux disponibles sur le marchť.
Il faut noter que bon nombre de Rťseaux ne sont que des variantes des Rťseaux les plus connus (ce qui ŗ tendance ŗ rendre l'offre encore plus difficile ŗ analyser), on retiendra pour l'exemple FIPIO qui est une version SENSOR BUS de FIP et FIPWAY la version DEVICE BUS. Mais les exemples ne s'arrÍtent pas lŗ puisque certains Rťseaux (comme CAN ou FIP, considťrťs comme des technologies), sont utilisťs comme des "supports" pour des applications, ce qui fait qu'entre 2 Rťseaux basťs sur CAN, il n'y a souvent que la couche 7 (couche d'application) qui les rend incompatible (par exemple SDS, DEVICENET, VAN et CAL ne sont que des applications spťcifiques de CAN pour un type de fonctionnement prťcis).
Ce genre de rťcupťration est assez intťressante puisqu'elle autorise l'utilisation de systŤmes CAN tout en les rendant plus spťcifique donc plus adaptable. Le bus CAN.
e bus CAN est nť en 1984 dans les ateliers BOSCH, initialement prťvu pour des applications automobiles, il s'est au fur et ŗ mesure ťtendu pour former une gamme industrielle complŤte. Les composants spťcifiques CAN sont fabriquťs par les plus grands manufacturiers (PHILIPS, INTEL, MOTOROLA, SIEMENS, NEC, THOMSON, NATIONAL SEMICONDUCTOR, etc.) et on considŤre que CAN reprťsente dťsormais un standard international.
CAN ou CONTROLER AREA NETWORK (Rťseau de contrŰle local) est un protocole de transmission diffťrentiel sťrie avec viol (aprŤs 5 bits) qui permet l'utilisation de systŤmes temps rťel pour des coŻts relativement faible.
Dťveloppť pour l'automobiles, il permet de rťduire les c‚blages internes des vťhicules en multiplexant sur une ligne les informations en provenances des divers ťlťments du vťhicule (gestion de la motorisation, des organes de signalisation, de l'allumage ťlectronique, etc.). EntiŤrement compatible avec la norme OSI, il est composť de 4 couches (en rťalitť 3 mais la couche de liaison a ťtť dťcoupťe entre LLC et MAC).
Il peut autoriser des dťbits de 20Kbits/s sur une distance de 1000m ou pour des distances rťduites, de l'ordre de 40m, autoriser un dťbit de 1Mbit/s. Les trames de donnťes peuvent accueillir un message comprenant jusqu'ŗ 8 octets. Gr‚ce ŗ son code CRC, il permet d'obtenir une probabilitť d'erreur rťmanente (non dťtectťs) de 4,7.10-11. Il dispose aussi d'un systŤme permettant la mise en sommeil des ťlťments du Rťseau (ce qui permet dans le cas de l'automobile de gťrer une alarme). Les trames CAN.Les communications sur le Rťseau CAN sont rťalisťes gr‚ce ŗ diffťrentes trames, chaque trame permettant de transmettre une information spťcifique (donnťes, requÍtes, surcharges ou erreurs). Ces trames sont composťes de plusieurs champs permettant de dťfinir tous les paramŤtres de la transmission. Entre 2 trames, on place un ou plusieurs intervalles "vides" permettant au rťcepteur de dťcoder le message et de signaler si on doit le placer dans un mode d'attente (surcharge), síil y a une erreur de transmission ou si d'autres donnťes sont nťcessaires.
Ainsi, une trame de donnťe est obligatoirement suivie soit d'une trame d'erreur, soit d'une trame de surcharge, soit d'un intertrame. Dans ce dernier cas, il peut apparaÓtre, aprŤs l'intertrame, ŗ nouveau une intertrame, une trame de requÍte ou de donnťes.
AprŤs une trame d'erreur, on peut voir soit un intertrame, soit une trame de surcharge. AprŤs une trame de surcharge, on peut voir apparaÓtre une nouvelle trame de surcharge ou un intertrame. Le protocole CSMA/NBALe protocole CSMA/NBA est un protocole sans contention, en cas de conflit, les machines s'arbitrent gr‚ce aux valeurs "d'index" qu'elles envoient.
Pour le protocole CSMA/NBA, il existe 2 niveaux de tension correspondant au "1" et au "0" logique, l'ťtat "0" est obtenu par mise directe ŗ la masse (on dit que c'est un ťtat dominant) et l'ťtat logique "1" s'obtient par passage dans un ťlťment rťsistif (on dit que c'est un ťtat rťcessif). En cas de confit, un ťtat dominant l'emporte toujours sur un ťtat rťcessif, l'arbitrage est donc facile ŗ faire et surtout il est non destructif puisqu'il ne nťcessite pas la rťťmission des 2 messages. D'oý le nom de ce protocole (NBA = Non-destructive Bitwise Arbitration ou arbitrage bit ŗ bit non destructif)
Ce protocole joue sur la capacitť de la couche physique ŗ absorber les chocs liťs aux conflits de bus. Toutefois, il reste encore teintť d'une connotation alťatoire, on ne peut en effet pas prťdire en combien de temps une machine peut transmettre un message, la seule chose qui soit sure, c'est que plus "l'index" contient des bits dominants au dťbut, plus le message devient prioritaire. Les trames de donnťes.Les trames de donnťes sont composťes de 7 champs, le premier permettant de dťfinir le dťbut de la trame (dťlimiteur de dťbut), puis, on trouve un champ d'arbitrage, utilisant le protocole CSMA/NBA, permettant ŗ la machine la plus prioritaire d'obtenir le contrŰle du bus. Vient aprŤs, le champ de contrŰle, permettant de dťfinir la longueur du message ŗ transmettre, puis on trouve le champ de donnťes oý se trouve le message. Enfin viennent les champs de contrŰle d'erreur champ de CRC), d'acquittement et de fin de trame.
Le dťlimiteur de dťbut.Le dťlimiteur de dťbut permet de dťfinir le dťbut de la trame. Il est constituť d'un simple bit dominant ("0") qui permet de lancer une resynchronisation des machines du Rťseau. La transmission du dťlimiteur n'est autorisťe que lorsque le code IDLE (prÍt ŗ transmettre) est dťtectť (intertrame). Le champ d'arbitrage.Le champ d'arbitrage est composť de 12 bits, 11 bits d'identification et 1 bit spťcial nommť RTR ou REMOTE TRANSMISSION REQUEST (demande de transmission ŗ distance). Les 11 bits d'identification servent ŗ dťfinir le ou les destinataires (on ne transmet pas une adresse mais un "descriptif" du message). Ils servent aussi ŗ dťfinir le niveau de prioritť des messages. C'est sur ce champ, qui est dťfinit lors de la mise en úuvre du Rťseau, que l'on rťalise l'arbitrage du bus (d'oý son nom).
Il faut noter que toutes les machines lisent le message mais seules celles destinataires du message sont susceptibles de l'utiliser. Les 11 bits sont transmis dans l'ordre ID10 (MSB) ŗ ID0 (LSB).
Le bit RTR permet d'effectuer une demande de transmission ŗ distance. Placť ŗ l'ťtat dominant, il signifie que l'on a une trame de donnťes, placť ŗ l'ťtat rťcessif il signifie que l'on a une trame de requÍte. Dans une trame de requÍte il n'y a pas de donnťes dans le champ de message, quelle que soit la longueur dťfinie dans le champ de contrŰle. Le champ de contrŰle.Le champ de contrŰle est composť de 6 bits, 4 permettent le codage de la longueur du message et les 2 autres servent ŗ dťfinir la version du protocole Rťseau utilisť.
Les 2 premiers bits du champ de contrŰle dťfinissent le protocole utilisť par le bus CAN. Le premier bit nommť IDE pour Identifier Extended permet de signifier si l'index est codť sur 11 bits (IDE ŗ l'ťtat Dominant, Rťseau ŗ la norme CAN 2.A) ou sur 29 bits (IDE ŗ l'ťtat rťcessif, Rťseau ŗ la norme CAN 2.B). Le second bit ťtant toujours ŗ l'ťtat dominant. La longueur du message est dťfinie au moyen des 4 bits suivant du champ de contrŰles.
Le champ de donnťes.Le champ de donnťes est composť de 0 ŗ 8 octets de donnťes. La taille de ce message est dťfinie par 4 bits du champ de contrŰle. Le champ de CRC.Le champ de CRC est composť de 16 bits. On a d'abord la sťquence CRC (15 bits), reprťsentant le reste de la division des bits des champs prťcťdents de la trame par le polynŰme suivant :
Díautre part, on a un marqueur de fin de CRC qui est un simple bit rťcessif appelť dťlimiteur de CRC (CRC DEL).
Le code CRC du message est calculť sur tous les champs prťcťdents (dťbut de trame, arbitrage, contrŰle et donnťes). Il ne tient pas compte du BIT-STUFFING du message mais est lui-mÍme soumis ŗ cette rŤgle. Le champ d'acquittement.Le champ d'acquittement est composť de 2 bits, d'un cotť, le bit d'acquittement (ACK SLOT), mis ŗ 1 (rťcessif) par l'ťmetteur et mis ŗ 0 (dominant) par les machines rťceptrices (il faut noter que toutes les machines doivent rťpondre, y compris celles qui ne sont pas concernťes par le message). De l'autre, le bit de dťlimitation (ACK DEL) qui est un bit rťcessif. Le champ de fin de trame.Le champ de fin de trame est composť de 2 champs, d'une part le champ d'intertrame (composť de 7 bits rťcessifs) et aprŤs le champ BUS-IDLE qui signifie que le bus est libre et dont la taille n'est pas limitťe. Les trames de requÍte.Les trames de requÍte sont composťes comme les trames de donnťes du dťlimiteur, suivit du champ d'arbitrage, du champ de contrŰle, du champ de CRC, du champ d'acquittement et du dťlimiteur de fin.
Il n'y a donc pas de champ de donnťes. Toutefois, dans le champ de contrŰle, la dťfinition de la longueur du message est, elle, totalement libre, on peut donc y inscrire toutes les valeurs utilisables (de 0 ŗ 8).
Le champ d'arbitrage est composť, comme pour une trame de donnťe de 11 bits d'identification et du bit RTR qui doit Ítre obligatoirement rťcessif. Les bits d'identification ťmis par la machine qui sollicite le transfert seront utilisťs pour identifier la rťponse. La rŤgle du BIT-STUFFING.
Le bus CAN ťtant asynchrone, l'horloge de l'ťmetteur et celle du rťcepteur ne sont pas identique en permanence (pas de boucle ŗ verrouillage de phase pour fabriquer l'horloge de rťception ŗ partir de la ligne de transmission). Toutefois, pour que le synchronisme des ťchanges reste correct, il faut que les 2 horloges soient ŗ peu prŤs identiques (on verra plus loin comment synchroniser les ťchanges). Pour cela, le rťcepteur essaye de caler son horloge sur celle de l'ťmetteur gr‚ce aux fronts (descendant) que celui-ci ťmet.
Dans cette hypothŤse, une longue absence de fronts risque de dťsynchroniser le rťcepteur et donc de crťer des problŤmes de rťception. Pour cela, rťguliŤrement, l'ťmetteur, quelque soit son message, va insťrer des fronts de resynchronisation, c'est le BIT-STUFFING.
Le BIT-STUFFING est un ťlťment important du Rťseau CAN, il permet ŗ l'horloge de rťception de ne pas dťriver trop vis ŗ vis de la frťquence de l'horloge d'ťmission. Il est rťalisť par l'ajout d'un bit rťcessif ou dominant (respectivement pour une sťrie de 5 bits dominants ou rťcessifs).
Le BIT-STUFFING s'applique aux champs suivants des trames de donnťes ou de requÍte : ∑ Le dťlimiteur de dťbut de trame. ∑ Le champ d'arbitrage. ∑ Le champ de contrŰle. ∑ Le champ de donnťes (quand il est prťsent). ∑ Le champ de CRC.
Les bits de STUFFING sont extrais ŗ la rťception, lorsque le rťcepteur dťtecte 5 bits dans un ťtat, il vťrifie que le 6Ťme n'est pas dans le mÍme ťtat (ce qui serait contraire ŗ la rŤgle de stuffing) et si ce bit est diffťrent de la sťrie prťcťdente, il l'ťlimine et reprend son analyse de la trame au bit suivant comme si de rien n'ťtait. Rťcapitulatif des trames CAN.
Format des diffťrents champs. Les trames d'erreurs.L'activitť principale du Rťseau CAN ťtant l'automobile, on comprend facilement le soin qui a ťtť portť ŗ la gestion des erreurs, car un systŤme automobile est par essence extrÍmement sensible aux ťventuelles dťfaillances du Rťseau. On doit donc rendre les ťlťments du Rťseau "intelligent" vis ŗ vis de la dťtection d'erreur.
Chaque núud du Rťseau CAN peut dťtecter 5 types d'erreurs. ∑ Les erreurs de bits qui sont liťes ŗ la dťtection par l'ťmetteur d'un ťtat diffťrent de celui ťmis. Il n'y a pas d'erreur si un bit dominant apparaÓt ŗ la place d'un bit rťcessif durant l'ťmission du champ d'arbitrage, du bit ACK SLOT ou durant l'ťmission une d'erreur passive. ∑ Les erreurs d'acquittement apparaissent lorsque le ACK SLOT n'est pas passť ŗ un ťtat dominant. ∑ Les STUFF ERROR (ou erreur de viol) signifie que la machine rťceptrice a dťtectť 6 bits dans le mÍme ťtat (alors qu'au bout de 5 bits, il doit en principe, il y avoir un viol). ∑ Les erreurs de CRC sont ťmises lorsque le champ de CRC ne correspond pas aux donnťes transmises. ∑ Les erreurs de forme sont ťmises lorsque la trame n'est pas conforme au format prťdťfini (trame trop courte par exemple).
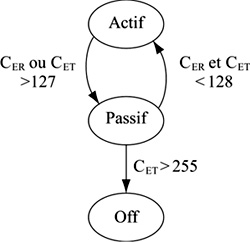
De plus, chaque núud dispose de 3 ťtats de rťceptivitť aux communications. L'ťtat actif, qui est l'ťtat normal de fonctionnement, l'ťtat passif qui est un mode lťgŤrement dťgradť et l'ťtat dťconnectť (ťtat Off) qui verrouille le contrŰleur en lui interdisant d'ťmettre et de recevoir des donnťes.
La trame d'erreur active est composťe de 6 bits dominants (appelťs ERROR FLAG) puis de 8 bits rťcessifs (ERROR DELIMITER), et ceci en violant les rŤgles du BIT-STUFFING.
La trame d'erreur passive est composťe de 6 bits rťcessifs (ERROR FLAG) puis du ERROR DELIMITER.
Les trames d'erreurs sont impťrativement suivies de 3 temps bit pendant lesquels le bus est laissť libre. Prťsentation de la trame d'erreur active
Une machine qui dťtecte une erreur ťmet immťdiatement (en interrompant la transmission du message, c'est ŗ dire sans en attendre la fin) son ERROR FLAG puis le premier bit de son ERROR DELIMITER. Si la machine est en mode actif, les 6 bits dominant qu'elle ťmet crťent une erreur de BIT-STUFFING pour toutes les autres machines du bus. Toutes les machines qui n'auraient pas dťtectť l'erreur initiale, envoient alors leur trame d'erreur. La ou les machines qui avaient dťtectť l'erreur initiale (et ťmis leurs ERROR FLAG) attendent l'apparition d'un front montant (passage du premier bit du ERROR DELIMITER de la derniŤre machine ayant dťtectť une erreur), pour ťmettre le reste du ERROR DELIMITER.
De plus, chaque machine comptabilise les erreurs qu'elle dťtecte ou qui lui sont signalťes gr‚ce ŗ deux compteurs, l'un en ťmission qui compte le nombre d'erreur que la machine rťalise lorsqu'elle ťmet, le second en rťception compte les erreurs que la machine dťtecte quand elle reÁoit.
Chaque fois qu'une erreur est dťtectťe, les machines ťmettent une trame d'erreur (active ou passive) et incrťmente leur compteur d'erreur concernť de 8 unitťs. Tout message transmis avec succŤs permet de dťcrťmenter le compteur concernť d'une unitť.
Dans notre premier exemple, La machine C est la seule qui souhaite parler, les machines A et B n'ayant rien ŗ transmettre durant toute la phase prťsentťe.
Dans notre deuxiŤme exemple, la machine A est la seule qui souhaite parler et la machine C est toujours dťfaillante.
Les trames de surcharge.L'ťmission d'une trame de surcharge rťpond ŗ un problŤme de surcharge sur l'une des machines. Elle permet de temporiser l'ťmission de la trame de donnťe suivante. Il ne peut y avoir plus de 2 trames de surcharge de suite pour ťviter qu'un problŤme sur une machine puisse bloquer les autres machines du Rťseau trop longtemps.
Comme pour les trames d'erreur, les trames de surcharges sont composťes de 2 champs. Le champ de surcharge (OVERLOAD FLAG) est composť de 6 bits dominants violant ainsi la rŤgle du BIT-STUFFING et par le dťlimiteur de surcharge (OVERLOAD DELIMITER) composť de 8 bits rťcessifs.
A la diffťrence des trames d'erreur, les trames de surcharges sont exclusivement ťmises ŗ la fin d'une trame de donnťes ou de requÍte tandis qu'une trame d'erreur interrompt la transmission. C'est díailleurs de cette faÁon que l'on diffťrentie les deux. Synchronisation des ťchanges.
L'utilisation de composants CAN nťcessite une certaine comprťhension de ce que l'on appelle la synchronisation des ťchanges. Il faut envisager ce point avec en mťmoire les rŤgles ťlťmentaires des transmissions. Le but de ce chapitre est de dťfinir les points importants de la transmission. La dťfinition de la vitesse maximale de transmission, la dťfinition du point d'ťchantillonnage, et enfin, la dťfinition des longueurs maximales des lignes du Rťseau. Dťcomposition d'un bit en segments.Un bit, au sens du Rťseau CAN, est composť de 3 segments, le segment de synchronisation, le segment nį1 qui est composť de la propagation et de la phase de prť-acquisition et enfin le segment 2.
L'horloge de transmission (TSCL ou System Clock) est rťalisťe ŗ partir de l'horloge du composant (TCLK). Ces deux horloges sont liťes par le terme NBRP ou Baud Rate Prescaler. On peut dont ťcrire la relation suivante :
Pour chaque bit transmis, la premiŤre pťriode de l'horloge systŤme est appelťe temps de resynchronisation (TSYNC), il permet ŗ la machine rťceptrice de se resynchroniser avec l'ťmetteur.
Viens en suite le temps de propagation de la ligne et les retards liťs aux diffťrents composants rencontrťs sur le bus. L'addition de ces temps forme le segment SEG1 (TSEG1).
On ajoute enfin un petit intervalle de temps pour permettre le traitement et ťventuellement pour obtenir une "marge d'erreur" sur la longueur d'un bit. Cela forme le segment SEG2 (TSEG2).
Pour permettre au systŤme de se resynchroniser, on autorise la trame ŗ Ítre rťduite ou au contraire prolongťe. Cette valeur est nommťe SJW pour Synchronisation Jump Width.
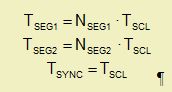
Pour les
segments SYNC, SEG1 et SEG2, on peut traduire la durťe des segments en un nombre
de pťriodes de l'horloge systŤme :
On peut donc en dťduire que la transmission d'un bit est la somme d'un nombre de pťriodes de l'horloge systŤme. Ce nombre est nommť NNBT (pour Nominal Bit Time) et se dťcompose de la faÁon suivante :
On cherchera toujours ŗ obtenir NNBT le plus grand possible.
De plus, les composants CAN permettent de rťaliser l'acquisition, au choix, de un ou de trois ťchantillons. On rťalise alors un "filtrage numťrique" en calculant la moyenne et en la comparant ŗ une certaine valeur. Cette possibilitť est nommťe SAM pour Sample Mode.
On a donc dťfinit, en fonction des limites des composants, les rŤgles liant les valeurs les unes aux autres.
Il existe aussi des critŤres de "qualitť" dans la dťfinition des segments d'un bus CAN. Cela reviens ŗ dire que le point d'ťchantillonnage doit se situer entre 66 et 75% de la taille de la trame. Autrement dit, on considŤre que :
Toutefois, dans certains cas, ces rŤgles ne peuvent Ítre atteinte, dans ce cas, il existe des limites qui sont simplement liťes ŗ la cohťrence du systŤme ou ŗ une vision moins restrictive de la norme :
Exemple de calcul. On souhaite transmettre ŗ l'aide d'un composant CAN dotť d'une horloge ŗ 16MHz des signaux ŗ un dťbit de 100Kbit/s en ne prenant qu'un seul ťchantillon, sur une ligne de 50m.
On reprendra ce calcul un peu plus loin pour prendre en compte la longueur souhaitťe de la ligne, lors du paragraphe sur les temps de propagation et sur la tolťrance de l'horloge. Rappel sur les oscillateurs.
Le fait de ne pas transmettre l'horloge dans une liaison CAN implique une resynchronisation rťguliŤre des diffťrents núuds du Rťseau. Cette resynchronisation est rťalisť ŗ chaque front descendant de la trame. Avec elle, le rťcepteur est capable de compenser la dťrive de son oscillateur local par rapport ŗ celui de l'ťmetteur, puisque par dťfinition, un front est synchrone avec l'horloge qui l'a crťť.
Cette synchronisation est rťalisťe par le NSJW et s'ťtablie de la faÁon suivante :
∑ Si le changement d'ťtat (front descendant) intervient durant le segment SYNC, la durťe du bit n'est pas modifiťe.
∑ Si le changement d'ťtat intervient aprŤs le segment SYNC, on parle d'erreur de phase positive, dans ce cas, le Segment 1 sera rallongť, dans la limite de la valeur de NSJW, d'un nombre entier de pťriodes de TSCL.
∑ Si le changement d'ťtat intervient avant le segment SYNC, on parle d'erreur de phase nťgative, dans ce cas, le segment 2 sera diminuť, dans la limite de la valeur de NSJW, d'un nombre entier de pťriodes de TSCL.
Dans le cas d'une erreur de phase positive, le segment nį1 en se rallongeant va compenser la perte de temps de propagation liťe au retard du front d'horloge. Cela revient
ŗ dire que tant que le retard du front est infťrieur ŗ
Dans le cas d'une erreur de phase nťgative, c'est le segment 2 du bit "prťcťdent" qui est atteint, cela n'a donc aucune consťquence sur la propagation. La tolťrance maximale sur l'oscillateur local d'un composant CAN est donnťe par la formule :
On notera que la tolťrance gťnťralement admise pour un astable est de 1,5%, de 0,1% pour un quartz non thermostatť et de 10ppm pour un quartz de trŤs bonne qualitť. Interface entre les composants CAN et la couche physique.
Dans la plus part des cas, il est impossible de placer directement le contrŰleur CAN sur la ligne physique, et on doit souvent utiliser des composants spťcifiques d'interfaÁage (par exemple le 82c250 de Philips). En effet, l'utilisation d'une ligne bifilaire ŗ des dťbits importants implique une adaptation d'impťdance. De plus les niveaux ťlectriques utilisťs sur les 2 voies diffťrentielles du Rťseau sont assez difficiles ŗ obtenir sans interfaÁage.
La norme CAN dťfinie 2 rŤgles de transfert, la rŤgle de transfert rapide (High Speed CAN) caractťrisťe par des dťbits supťrieurs ŗ125Kbit/s et la rŤgle de transfert lent (Low Speed CAN) caractťrisťe par des dťbits infťrieurs ŗ 100Kbit/s. High Speed CAN.Les contraintes technologiques liťes ŗ l'utilisation de CAN ŗ des dťbits ťlevťs, sont les suivantes :
La ligne utilisťe est alors de la forme suivante :
D'oý les niveaux de tension :
Low Speed CAN.
Les contraintes technologiques liťes ŗ l'utilisation de CAN ŗ des dťbits faible, sont les suivantes :
La ligne utilisťe est alors de la forme suivante :
D'oý les niveaux de tension :
Fonctionnement du systŤme physique.Cette petite ťtude ŗ pour but de vous familiariser avec votre environnement de travail lorsque vous allez utiliser le Rťseau CAN, on va donc síintťresser aux temps de propagation.
Si l'on simplifie un peu la chaÓne d'un Rťseau CAN, on arrive rapidement au schťma suivant :
Prťsentation d'un Rťseau CAN (pire des cas).
La distance la plus longue entre 2 machines CAN permet de calculer le temps de propagation maximum du Rťseau. Ce temps de propagation est composť de 3 ťlťments :
Calcul du temps de propagation sur la ligne.Le temps mis par une onde ŗ se propager sur la ligne dťpend beaucoup de la vitesse de phase de la ligne. Dans la plupart des cas, la vitesse de propagation est de 220 000km/s. Soit un temps de propagation par mŤtre de l'ordre de 5ns (pour 200 000km/s ou 5,5ns pour 180 000km/s ou 4,5ns pour 220 000km/s). Dťfinition des paramŤtres de l'adaptateur.L'adaptateur peut Ítre soit encapsulť (composant discret) soit rťalisť par le dťveloppeur. Dans tous les cas, la dťfinition des temps de propagation est extrÍmement variable. On se contente donc de rťaliser ce calcul gr‚ce aux documents constructeurs (cas des composants discrets) ou par des essais (cas des composants fait main). Gťnťralement on essaie d'obtenir des temps de l'ordre de 10ns. Dťfinition des paramŤtres du contrŰleur.Le contrŰleur CAN doit acquťrir les signaux pour pouvoir les traiter. Cette acquisition se fait par l'intermťdiaire de bascules D. Ces bascules sont directement reliťes ŗ l'horloge du contrŰleur. Par contre la rťťmission elle se fait directement sur les sorties des bascules díacquisition. On peut donc dťduire que le temps maximum mis par le contrŰleur pour acquťrir des signaux et les restituer est une pťriode de l'horloge.
Calcul du temps de propagation global.
Le temps de propagation rťel du Rťseau CAN est dťfinit par la formule suivante :
Gr‚ce ŗ cette formule, on peut imposer la valeur minimum du temps de propagation du Rťseau gr‚ce ŗ la formule :
Dans le cas de notre exemple prťcťdent nous avions trouvť : NSEG1 = 11; NSEG2 = 4; TSCL = 625ns.
Pour TTX = TRX = 40ns et TSD = TOSC = 62,5ns, si l'on souhaite une longueur de ligne d'au moins 40m, on trouve :
Selon la formule utilisťeÖ
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||